
Abstract
Purpose
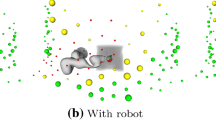
Advances in radiation therapy delivery systems have enabled motion compensated SBRT of the prostate. A remaining challenge is the integration of fast, non-ionizing volumetric imaging. Recently, robotic ultrasound has been proposed as an intra-fraction image modality. We study the impact of integrating a light-weight robotic arm carrying an ultrasound probe with the CyberKnife system. Particularly, we analyze the effect of different robot poses on the plan quality.
Methods
A method to detect the collision of beams with the robot or the transducer was developed and integrated into our treatment planning system. A safety margin accounts for beam motion and uncertainties. Using strict dose bounds and the objective to maximize target coverage, we generated a total of 7650 treatment plans for five different prostate cases. For each case, ten different poses of the ultrasound robot and transducer were considered. The effect of different sets of beam source positions and different motion margins ranging from 5 to 50 mm was analyzed.
Results
Compared to reference plans without the ultrasound robot, the coverage typically drops for all poses. Depending on the patient, the robot pose, and the motion margin, the reduction in coverage may be up to 50 % points. However, for all patient cases, there exist poses for which the loss in coverage was below 1 % point for motion margins of up to 20 mm. In general, there is a positive correlation between the number of treatment beams and the coverage.
Conclusion
While the blocking of beam directions has a negative effect on the plan quality, the results indicate that a careful choice of the ultrasound robot’s pose and a large solid angle covered by beam starting positions can offset this effect. Identifying robot poses that yield acceptable plan quality and allow for intra-fraction ultrasound image guidance, therefore, appears feasible.










Similar content being viewed by others

References
King CR, Freeman D, Kaplan I, Fuller D, Bolzicco G, Collins S, Meier R, Wang J, Kupelian P, Steinberg M, Katz A (2013) Stereotactic body radiotherapy for localized prostate cancer: pooled analysis from a multi-institutional consortium of prospective phase II trials. Radiother Oncol 109(2):217–221
Fuller DB, Naitoh J, Lee C, Hardy S, Jin H (2008) Virtual HDR cyberknife treatment for localized prostatic carcinoma: dosimetry comparison with HDR brachytherapy and preliminary clinical observations. Int J Radiat Oncol Biol Phys 70(5):1588–1597
Schweikard A, Glosser G, Bodduluri M, Murphy MJ, Adler JR (2000) Robotic motion compensation for respiratory movement during radiosurgery. Comput Aided Surg 5(4):263–277
Keall PJ, Sawant A, Cho B, Ruan D, Wu J, Poulsen P, Petersen J, Newell LJ, Cattell H, Korreman S (2011) Electromagnetic-guided dynamic multileaf collimator tracking enables motion management for intensity-modulated arc therapy. Int J Radiat Oncol Biol Phys 79(1):312–320
Krauss A, Fast MF, Nill S, Oelfke U (2012) Multileaf collimator tracking integrated with a novel X-ray imaging system and external surrogate monitoring. Phys Med Biol 57(8):2425–2439
Lang S, Zeimetz J, Ochsner G, Schmid Daners M, Riesterer O, Klöck S (2014) Development and evaluation of a prototype tracking system using the treatment couch. Med Phys 41(2):021720
D’Souza WD, Naqvi SA, Yu CX (2005) Real-time intra-fraction-motion tracking using the treatment couch: a feasibility study. Phys Med Biol 50(17):4021–4033
Depuydt T, Poels K, Verellen D, Engels B, Collen C, Haverbeke C, Gevaert T, Buls N, Van Gompel G, Reynders T, Duchateau M, Tournel K, Boussaer M, Steenbeke F, Vandenbroucke F, De Ridder M (2013) Initial assessment of tumor tracking with a gimbaled linac system in clinical circumstances: a patient simulation study. Radiother Oncol 106(2):236–240
Tong X, Chen X, Li J, Xu Q, Lin MH, Chen L, Price RA, Ma CM (2015) Intrafractional prostate motion during external beam radiotherapy monitored by a real-time target localization system. J Appl Clin Med Phys 16(2):5013
Kupelian P, Willoughby T, Mahadevan A, Djemil T, Weinstein G, Jani S, Enke C, Solberg T, Flores N, Liu D, Beyer D, Levine L (2007) Multi-institutional clinical experience with the Calypso system in localization and continuous, real-time monitoring of the prostate gland during external radiotherapy. Int J Radiat Oncol Biol Phys 67(4):1088–1098
Fallone BG (2014) The rotating biplanar linac-magnetic resonance imaging system. Semin Radiat Oncol 24(3):200–202
Keall PJ, Barton M, Crozier S (2014) On behalf of the Australian MRI-Linac Program, including contributors from the Ingham Institute, Illawarra Cancer Care Centre, Liverpool Hospital, Stanford University, Universities of Newcastle, Queensland, Sydney, Western Sydney, and Wollongong. The Australian magnetic resonance imaging-linac program. Semin Radiat Oncol 24(3):203–206
Lagendijk JJ, Raaymakers BW, Raaijmakers AJ, Overweg J, Brown KJ, Kerkhof EM, van der Put RW, Hårdemark B, van Vulpen M, van der Heide UA (2008) MRI/linac integration. Radiother Oncol 86(1):25–29
Bruder R, Ernst F, Schlaefer A, Schweikard A (2009) TH-C-304A-07: real-time tracking of the pulmonary veins in 3D ultrasound of the beating heart. 51st Annual meeting of the AAPM. Med Phys, vol 36, p 2804
Bruder R, Ernst F, Schlaefer A, Schweikard A (2011) A framework for real-time target tracking in radiosurgery using three-dimensional ultrasound. In: Proceedings of the 25th international congress and exhibition on computer assisted radiology and surgery (CARS’11), Int J CARS, vol 6, pp S306–S307
Schlosser J, Salisbury K, Hristov D (2010) Telerobotic system concept for real-time soft-tissue imaging during radiotherapy beam delivery. Med Phys 37(12):6357–6367
Bohrer M, Schröder P, Welzel G, Wertz H, Lohr F, Wenz F, Mai SK (2008) Reduced rectal toxicity with ultrasound-based image guided radiotherapy using BAT (B-mode acquisition and targeting system) for prostate cancer. Strahlenther Onkol 184(12):674–678
Cury FL, Shenouda G, Souhami L, Duclos M, Faria SL, David M, Verhaegen F, Corns R, Falco T (2006) Ultrasound-based image guided radiotherapy for prostate cancer: comparison of cross-modality and intramodality methods for daily localization during external beam radiotherapy. Int J Radiat Oncol Biol Phys 66(5):1562–1567
Bruder R, Ernst F, Schweikard A (2011) SU-D-220-02: optimal transducer positions for 4D ultrasound guidance in cardiac IGRT. 53rd Annual meeting of the AAPM. Med Phys, vol 38, p 3390
Kuhlemann I, Bruder R, Ernst F, Schweikard A (2014) WEG-BRF-09: force-and image-adaptive strategies for robotised placement of 4D ultrasound probes. 56th Annual meeting of the AAPM. Med Phys, vol 41, p 523
Bortfeld T (2010) The number of beams in IMRT-theoretical investigations and implications for single-arc IMRT. Phys Med Biol 55(1):83–97
Stein J, Mohan R, Wang XH, Bortfeld T, Wu Q, Preiser K, Ling CC, Schlegel W (1997) Number and orientations of beams in intensity-modulated radiation treatments. Med Phys 24(2):149–160
Schlaefer A, Gill J, Schweikard A (2008) A simulation and training environment for robotic radiosurgery. Int J CARS 3:267–274
Echner GG, Kilby W, Lee M, Earnst E, Sayeh S, Schlaefer A, Rhein B, Dooley JR, Lang C, Blanck O, Lessard E, Maurer CR Jr, Schlegel W (2009) The design, physical properties and clinical utility of an iris collimator for robotic radiosurgery. Phys Med Biol 54(18):5359–5380
Schweikard A, Schlaefer A, Adler JR Jr (2006) Resampling: an optimization method for inverse planning in robotic radiosurgery. Med Phys 33(11):4005–4011
Schlaefer A, Schweikard A (2008) Stepwise multi-criteria optimization for robotic radiosurgery. Med Phys 35(5):2094–2103
Lovelock DM, Messineo AP, Cox BW, Kollmeier MA, Zelefsky MJ (2015) Continuous monitoring and intrafraction target position correction during treatment improves target coverage for patients undergoing SBRT prostate therapy. Int J Radiat Oncol Biol Phys 91(3):588–594
Şen HT, Lediju BMA, Zhang Y, Ding K, Wong J, Iordachita I, Kazanzides P (2015) System integration and preliminary in-vivo experiments of a robot for ultrasound guidance and monitoring during radiotherapy. In: Proceedings of the international conference on advanced robotics, 2015, pp 53–59
Bazalova-Carter M, Schlosser J, Chen J, Hristov D (2015) Monte Carlo modeling of ultrasound probes for image guided radiotherapy. Med Phys 42(10):5745–5756
Schlosser J, Hristov D (2016) Radiolucent 4D ultrasound imaging: system design and application to radiotherapy guidance. IEEE Trans Med Imaging. doi:10.1109/TMI.2016.2559499
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Funding
This study was partially funded by Deutsche Forschungsgemeinschaft (Grants ER 817/1-1 and SCHL 1844/3-1).
Conflict of interest
Ralf Bruder is co-inventor of a patent pending method for positioning an ultrasound transducer. Floris Ernst has received Grants from Varian Medical Systems, Inc. The other authors declare no conflict of interest.
Ethical approval
This article is based on fully anonymized treatment planning data and does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
For this type of study formal consent is not required.
Rights and permissions
About this article

Cite this article
Gerlach, S., Kuhlemann, I., Jauer, P. et al. Robotic ultrasound-guided SBRT of the prostate: feasibility with respect to plan quality. Int J CARS 12, 149–159 (2017). https://doi.org/10.1007/s11548-016-1455-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-016-1455-7